 |
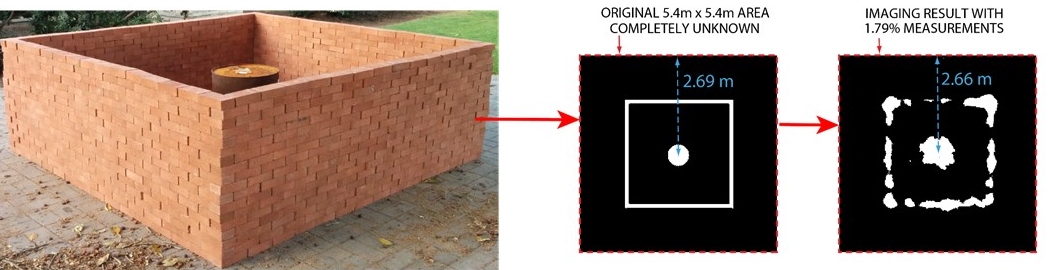
| Figure 1. Measurement area and a sample imaging result (LOS-based) |
 |
| Figure 2. Pioneer 3-AT robot |
In this website, we release some of our WiFi datasets, collected by robots for imaging the unknown area shown below. Pioneer 3-AT robots (Figure 2) are used to autonomously position the TX/RX in these experiments, where each robot is equipped with a directional antenna (21 degrees horizontal and 17 degrees vertical beamwidth, 15 dBi gain). The robots move outside of the area where one robot transmits using a D-link WBR1310 wireless router and the other robot measures RSSI using an Atheros ar5006x WiFi card.
In this site, you will find the measurements and the corresponding details. For further information on imaging based on such data and sample imaging results, please refer to the project page and the project video. This project is an ongoing work in Prof. Yasamin Mostofi's lab.
If you have any questions or comments regarding this dataset, please contact Chitra Karanam. We will release more measurements in the near future. If you are interested in receiving an email when we post more data with other areas/antennas, please send an email to ckaranam@ece.ucsb.edu to be added to our list.
|
|
This dataset can be used for academic purposes only.
If you use this dataset for your research, please acknowledge this website at http://dx.doi.org/10.21229/M9RP4K and cite the following papers:
S. Depatla, L. Buckland, and Y. Mostofi, "X-Ray Vision with Only WiFi Power Measurements Using Rytov Wave Models," IEEE Transactions on Vehicular Technology, special issue on Indoor Localization, Tracking, and Mapping, volume 64, issue 4, pp. 1376-1387, April 2015.[pdf]
@article{TVT15,
title={{X-Ray Vision with Only WiFi Power Measurements Using Rytov Wave Models}},
author={Depatla, S. and Buckland, L. and Mostofi, Y.},
journal={IEEE Transactions on Vehicular Technology},
year={2015},
volume={64},
issue={4},
pages={1376-1387},
month={April}}
Y. Mostofi, "Cooperative Wireless-Based Obstacle/Object Mapping and See-Through Capabilities in Robotic Networks," IEEE Transactions on Mobile Computing, DOI: 10.1109/TMC.2012.32, January 2012.[pdf]
@article{Mostofi_TMC12,
title={{Cooperative Wireless-Based Obstacle/Object Mapping and See-Through Capabilities in Robotic Networks}},
author={Y. Mostofi},
journal={IEEE Transactions on Mobile Computing},
year={2012},
month={January}}
Bibtex link for this website:
@misc{through_wall_2014,
title={{Mostofi-Lab WiFi RSSI Data for Through-wall Imaging (2014)}},
howpublished = {\url{http://dx.doi.org/10.21229/M9RP4K}}}
The data for the area of Figure 1 can be downloaded from the link below.
The description of the routes taken, and the location at which each measurement is made, can be found in the Readme document.
The data measured for each route as well as the coordinates of the transmitter and receiver where the measurements are made can be found in the corresponding .MAT file. For example, rx_route_0deg_tx_route_0deg is the MAT file which contains the coordinates of the transmitter and receiver, and the corresponding measured RSSI, for the route along 0 degree.
The real 2D map of the unknown area is available from the above link as a bitmap file named Real2D.bmp
These related papers further show how such data has been utilized in research and may be of interest.
A. Gonzalez-Ruiz and Y. Mostofi, "Cooperative Robotic Structure Mapping Using Wireless Measurements - A Comparison of Random and Coordinated Sampling Patterns," IEEE Sensors Journal, volume 13, issue 7, April 2013.[pdf][bibtex]
A. Gonzalez-Ruiz, A Ghaffarkhah, and Y. Mostofi, "An Integrated Framework for Obstacle Mapping with See-Through Capabilities using Laser and Wireless Channel Measurements," IEEE Sensors Journal, volume 14, issue 1, Jan. 2014.[pdf][bibtex]
For a more comprehensive list of papers, please refer to the Publications.