NSF PROJECT CCR-0311084
INFINITE DIMENSIONAL STOCHASTIC HYBRID SYSTEMS:
A Unified Framework for Distributed Control with Limited and Disrupted Communication

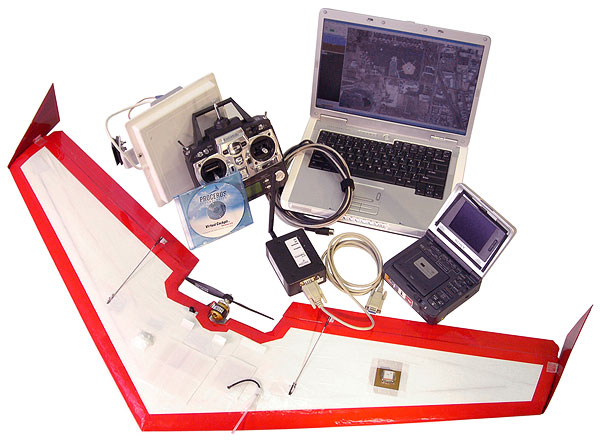
networked control system
PI: João P. Hespanha
Email: hespanha @ ece.ucsb.edu
Tel: +1 (805) 893-7042
Fax: +1 (805) 893-3262
coPI: Andrew R. Teel
Email: teel @ ece.ucsb.edu
Tel: +1 (805) 893-3616
Fax: +1 (805) 893-3262
Electrical & Computer Engineering Dept. (ECE)
University of California, Santa Barbara (UCSB)
Postal address:
Room 5157, Harold Frank Hall
Dept. of Electrical & Computer Eng.
University of California
Santa Barbara, CA 93106-9560 USA